BP神经网络
神经元模型
神经网络中最基本的成分是神经元模型。神经元模型源自“仿生”的思想,是对生物神经元的一种模仿。
首先,看一下生物学上的神经元。
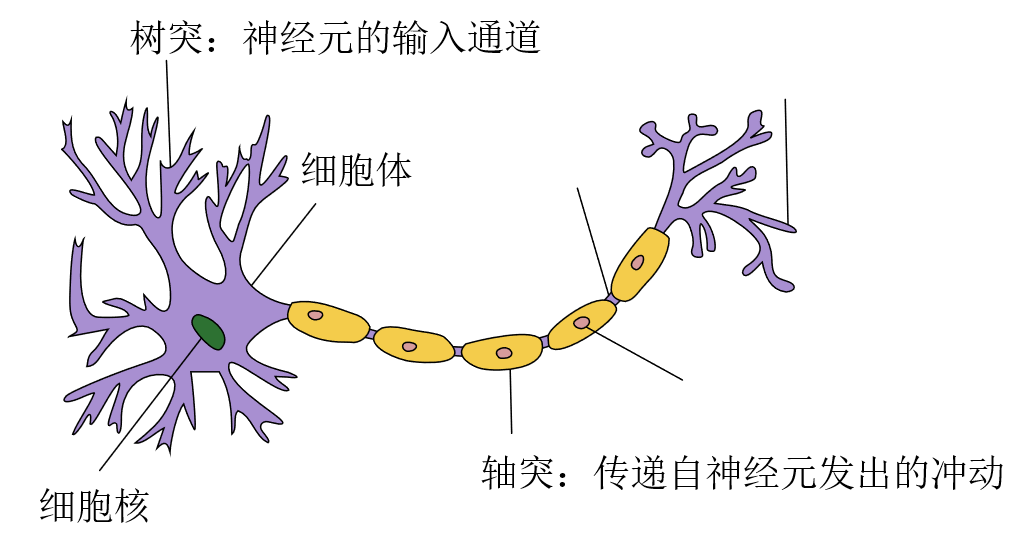
只观察主要部分,我们可以发现生物学上的神经元由三部分组成:细胞体、细胞核、突触。突触可以分为树突和轴突,树突是神经元的输入通道,轴突用于传递自神经元发出的冲动。当神经递质含量满足要求时,神经元便会兴奋、传递冲动。
对生物学上的神经元进行简单的抽象,便得到了M-P神经元模型。
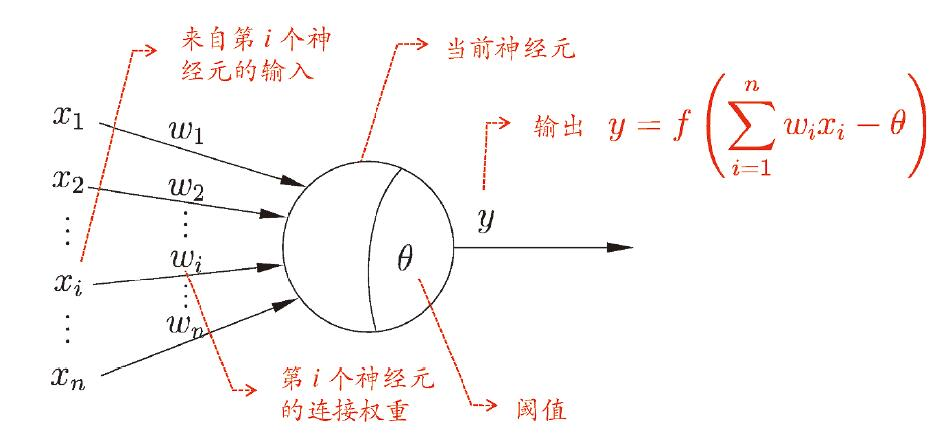
在这个模型中,神经元按权重接收来自其他 $n$ 个神经元传递的输入信号,这些总输入值与神经元的阈值进行比较后,通过“激活函数”处理以产生输出,即。
如何选定激活函数呢?典型的激活函数有以下两种:
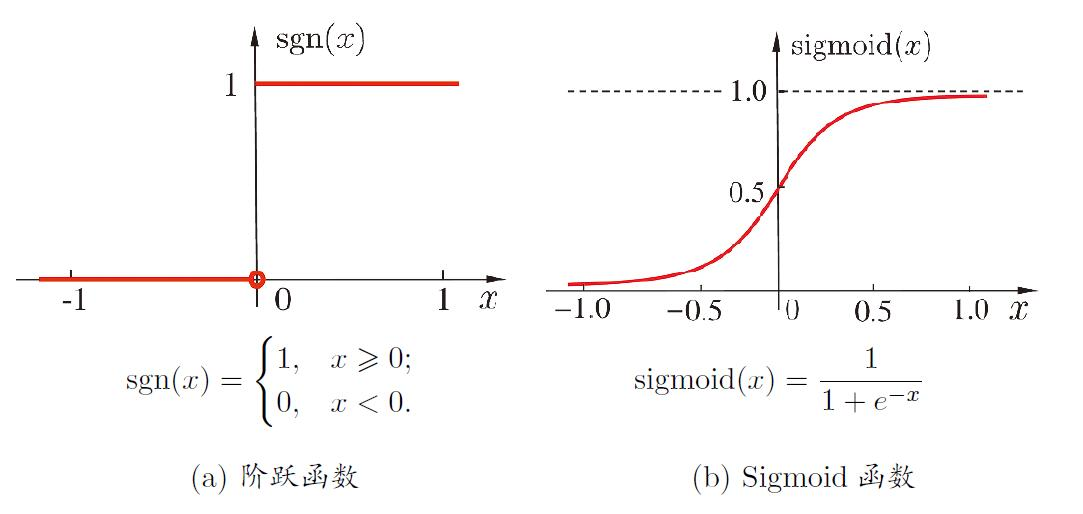
因阶跃函数具有不连续、不平滑的特性,因此常采用$S$型函数,$Sigmoid$函数是最常用的$S$型函数,需要神经元的输出区间为$[-1,1]$时,$S$型函数可以选为双曲正切函数
$Sigmoid$函数也存在缺点,当输入的绝对值大于某个阈值时会过快进入饱和状态,使梯度趋于0,模型收敛缓慢。
$ReLU$函数在一些现代神经网络中也很常用,它是一个很简单的分段线性函数
尽管形式简单,但其在卷积神经网络中效果很好。
感知机与多层网络
感知机(Perceptron):两层神经元,用于实现“与”、“或”、“非”运算。
注意:感知机不能实现异或运算!
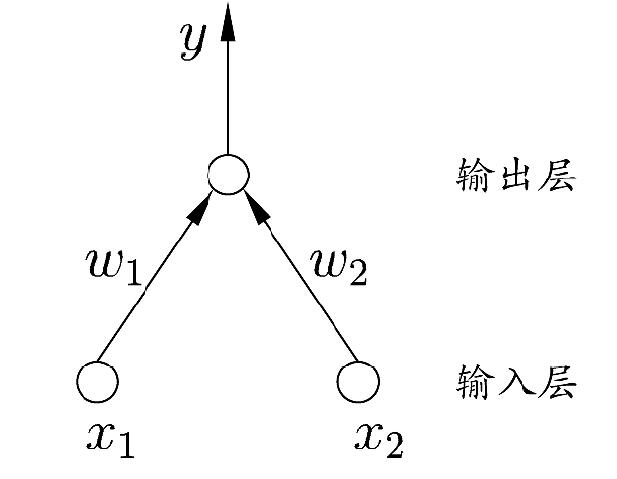
对于上图所示的感知机,选用阶跃函数,有:
对二维空间进行简单划分即可分别得到与、或、非运算的激活函数,他们不是唯一的。
| $x_1$ | $x_2$ | $y=f(1⋅x_1+1⋅x_2-2)$ | $y=f(1⋅x_1+1⋅x_2-0.5)$ | $y=f(-0.6⋅x_1+0⋅x_2+0.5)$ |
|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 1 |
| 0 | 1 | 0 | 1 | 1 |
| 1 | 0 | 0 | 1 | 0 |
| 1 | 1 | 1 | 1 | 0 |
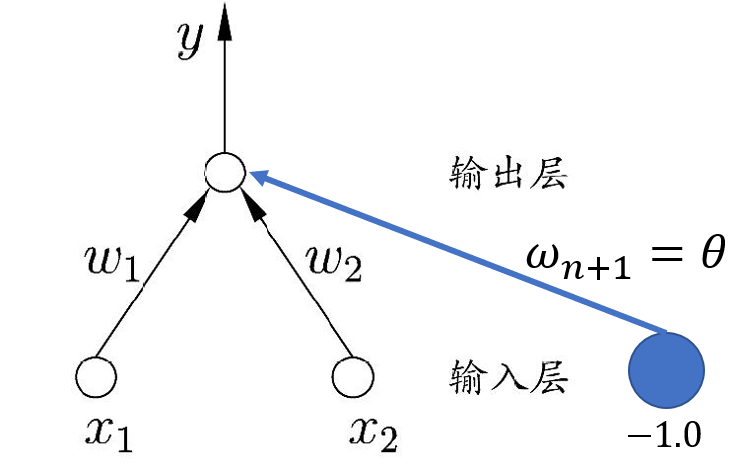
更一般地,我们可以给定数据集,让神经网络通过学习以确定权重和阈值$\theta$。若将阈值$\theta$视作固定输入为$-1.0$的哑结点所对应的连接权重$\omega_{n+1}$,则可将权重和阈值$\theta$的学习统一为权重的学习。
感知机的学习规则为:
其中 $\eta \in (0,1)$,称为学习率,属于超参数。
学习过程很简单:若感知机对训练样例 $(\boldsymbol x,y)$ 中 $\boldsymbol x$ 预测的结果 $\hat{y}$ 等于 $y$ ,则感知机不发生变化。否则,感知机根据错误的程度(残差)进行权重调整。
接下来说明一下为什么两层神经元的感知机不能实现异或运算。首先来看一下与、或、非、异或在二维空间中应怎样被划分。
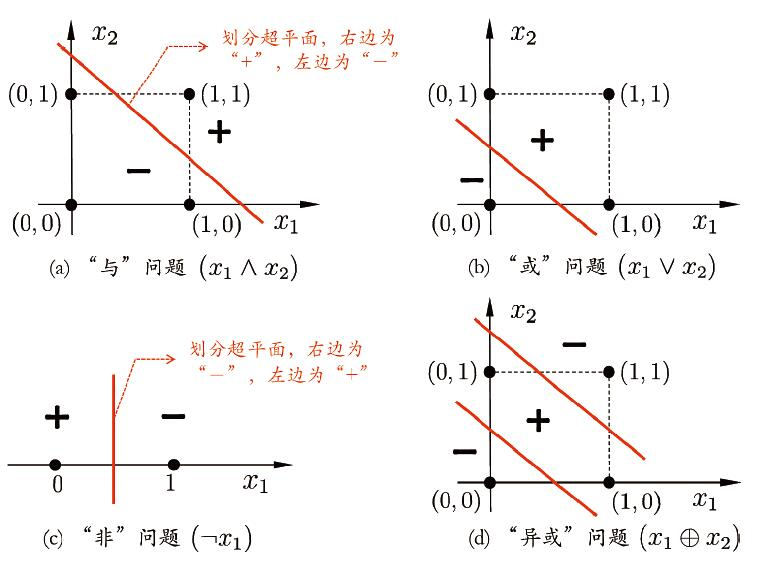
显然,异或问题需要两条直线才能将平面划分为两类模式,而与、或、非只需要一条直线即可。
对于一个有两类模式的空间,若存在一个超平面($n$ 维欧氏空间中维度等于 $n-1$ 的线性子空间,eg. 平面中的直线)能将他们分开,则称这两类模式是线性可分的。若两类模式是线性可分的,则感知机的学习过程一定会收敛,得到权向量 .否则感知机会发生振荡,无法求得合适解。
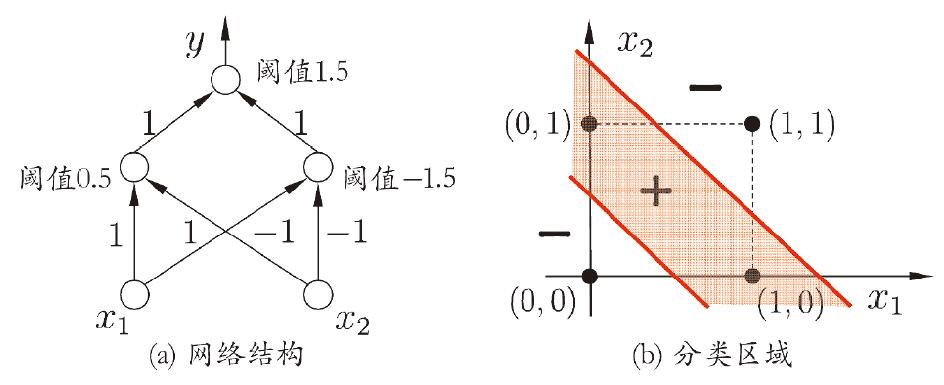
要解决线性可分问题,需要使用多层神经网络。对于异或问题,我们只需要先对与、或问题中的直线使用线性规划
由简单的谓词逻辑:$P\oplus Q = \neg (P \wedge Q) \wedge (P \vee Q) $,接着对$y^{(1)}=f(x_1+x_2-0.5)$和$y^{(2)}=f(-x_1-x_2+1.5)$使用与问题的激活函数即可。
| $x_1$ | $x_2$ | $y^{(1)}=f(x_1+x_2-0.5)$ | $y^{(2)}=f(-x_1-x_2+1.5)$ | $y=y^{(1)}+y^{(2)}-1.5$ |
|---|---|---|---|---|
| 0 | 0 | 0 | 1 | 0 |
| 0 | 1 | 1 | 1 | 1 |
| 1 | 0 | 1 | 1 | 1 |
| 1 | 1 | 1 | 0 | 0 |
最终得到二层感知机如下,输入层与输出层之间的其他神经元层称作隐层。
更一般地,常见的神经网络形如:
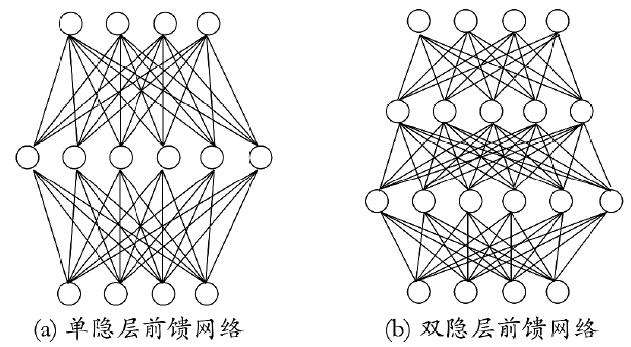
多层前馈神经网络(multi-layer feedforward neural networks):仅在相邻层间全互连、且包含隐含层的神经网络
注:“前馈”并不意味着网络中信号不能向后传,而是指网络拓扑结构上不存在环或回路。
误差反向传播算法
欲训练一个多层前馈神经网络,我们需要更强大的算法,这其中最成功的神经网络算法即为误差反向传播算法(BackPropagation, BP ),而且它不仅可用于训练多层前馈神经网络,还可用于其他神经网络。通常,“BP网络”指使用BP算法训练的多层前馈神经网络。
下面我们来推导一下BP算法。
首先,给出训练集$D=\{(\boldsymbol x_1, \boldsymbol y_1 ), (\boldsymbol x_2, \boldsymbol y_2 ), …, (\boldsymbol x_m, \boldsymbol y_m )\}, \boldsymbol x_i∈\mathbb{R}^d, \boldsymbol y_i∈\mathbb{R}^l$
给出如下多层前馈神经网络
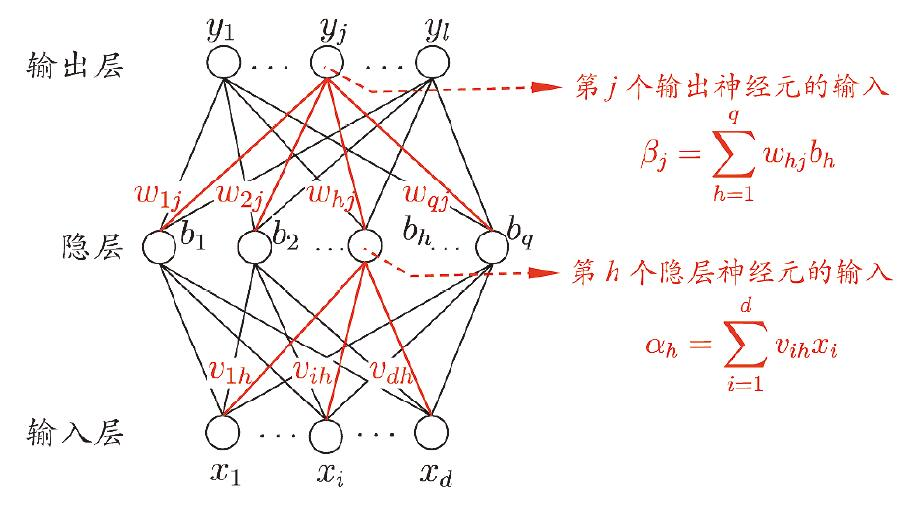
其变量意义标注如下表。
| 变量 | 意义 |
|---|---|
| $d$ | 输入神经元个数 |
| $l$ | 输出神经元个数 |
| $q$ | 隐层神经元个数 |
| $\theta_j$ | 输出层第$j$个神经元的阈值 |
| $γ_h$ | 隐层第$j$个神经元的阈值 |
| $v_{ih}$ | 输出层第$i$个神经元与隐层第$h$个神经元间的连接权 |
| $ω_{hj}$ | 隐层第$h$个神经元与输出层第$j$神经元间的连接权 |
| $\alpha_h$ | 隐层第$h$个神经元接收到的输入 |
| $\beta_j$ | 输出层第$j$个神经元接收到的输入 |
| $b_h$ | 隐层第$h$个神经元的输出 |
设其隐层和输出层神经元使用$Sigmoid$函数。
对训练例$(\boldsymbol x_k, \boldsymbol y_k )$,假定神经网络的输出为$y ̂_k=(y ̂_1^k,y ̂_2^k,…,y ̂_l^k)$,其中$y ̂_j^k=f(β_j-θ_j)$,
则网络在$(\boldsymbol x_k, \boldsymbol y_k )$上的均方误差为:
需要确定的参数:
输入层到隐层的$d×q$个权值
隐层到输出层的$q×l$个权值
隐层神经元的$q$个阈值
输出层神经元的$l$个阈值
共$d×q+q×l+q+l=(d+l+1)×q+l$个
广义感知机学习规则:任意参数$v$的更新估计式
对于参数$\omega_{hj}$,以目标的负梯度方向对其进行调整:
其中
由$\beta_j$的定义,有:
$Sigmoid$的导函数:
所以
对于参数$\theta_j$:
因为
又
所以
对于参数$v_{ih}$:
因为
又
所以
对于$\Delta \gamma_h$
因为
又
所以
综上:
需要精细调节时,可令(1)与(2)使用$\eta_1$,(3)与(4)使用$\eta_2$
由此,我们可以给出标准BP算法:
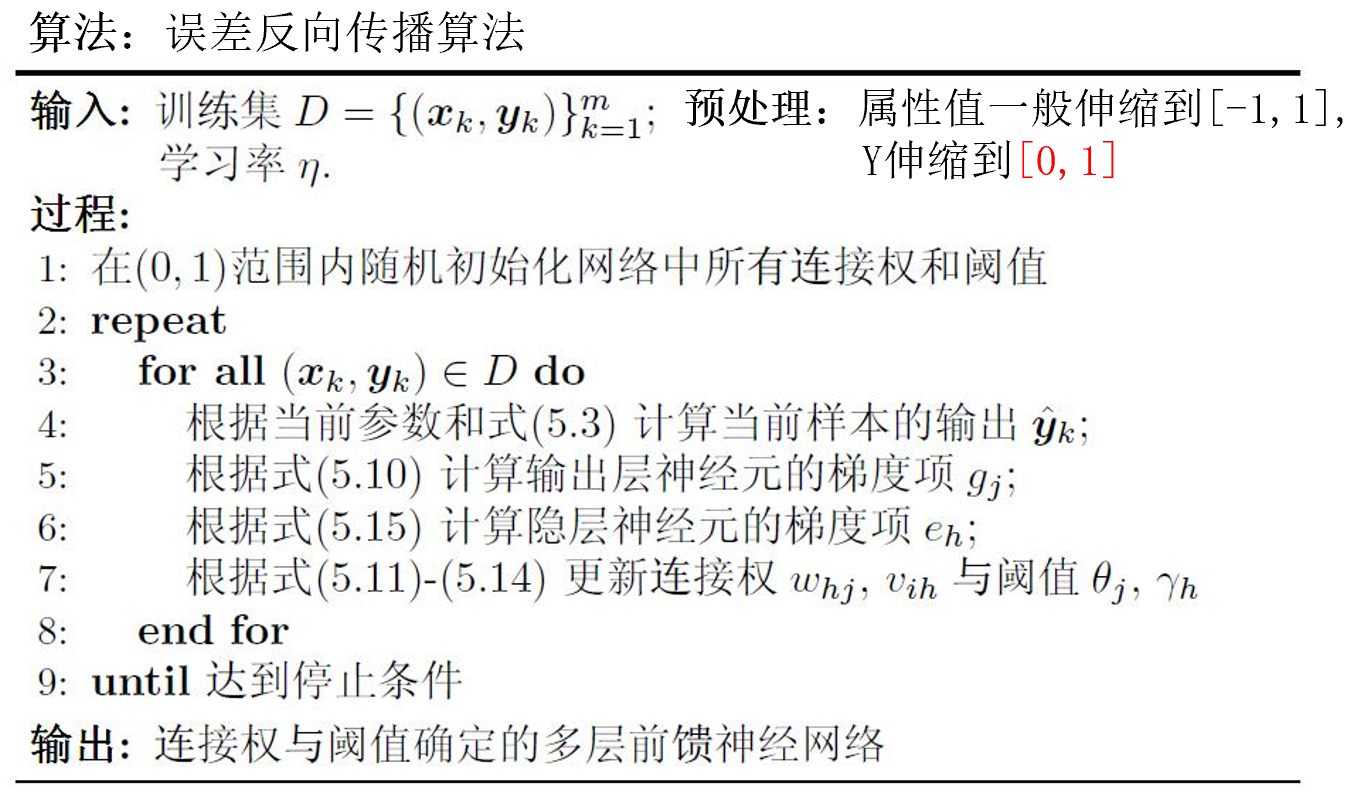
值得注意的是,BP算法的最终目标应为最小化训练集$D$上的累计误差
但刚才的标准BP算法基于最小化均方误差$E_k$推导。
累计误差反向传播算法
标准BP算法由单个均方误差$E_k$推导而来,所以每次更新针对单个样例,更新频繁。
同时,同一数据集中不同样例的反向更新可能出现“抵消”现象。
若类似地,对之前最终目标中提到的累积误差推导更新规则,便得到了更新频率更低的累计误差反向传播算法。
标准 BP 算法
每次针对单个训练样例更新权值与阈值
参数更新频繁,不同样例可能抵消,需要多次迭代
累计BP算法
其优化目标是最小化整个训练集上的累计误差
读取整个训练集一遍才对参数进行更新 , 参数更新
过拟合
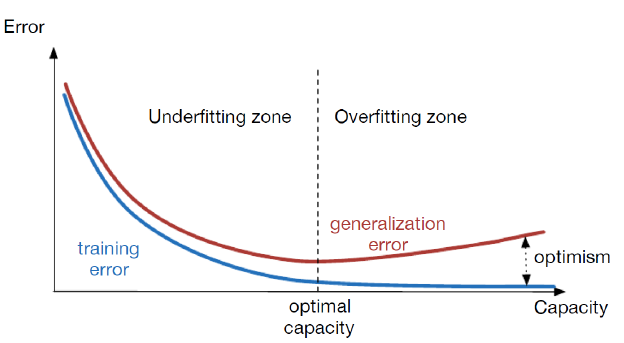
BP网络经常出现过拟合现象。
过拟合(overfitting):训练误差持续降低,测试误差上升。即model对训练集性能很好,对测试集性能很差,也就是model的generalization差。
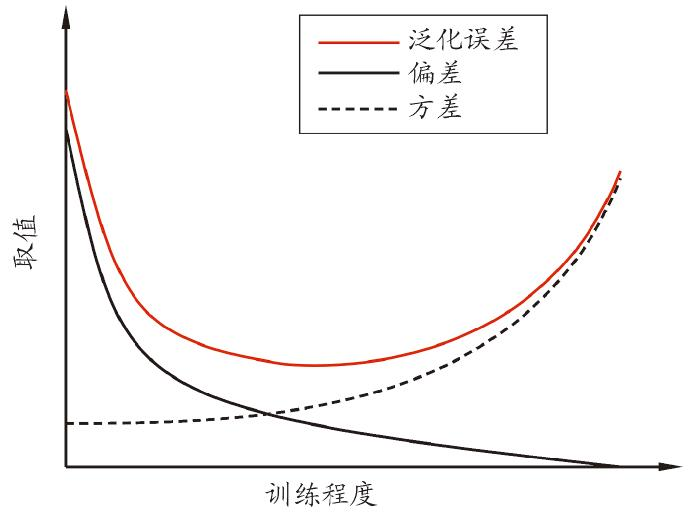
偏差–方差窘境:
缓解过拟合现象有几种策略:
确保训练数据集和测试数据集是independent, identical distributed(i.i.d)的;
早停( early stopping ):若训练集误差降低,但验证集误差升高,则停止训练;
正则化( regularization ):在误差目标函数中增加一个用于描述网络复杂度的部分。例如:
全局最小与局部最小
局部极小:对,都有,则为局部极小解。即梯度为$0$且$E$小于某个邻点。
全局极小:对,都有则为全局极小解。
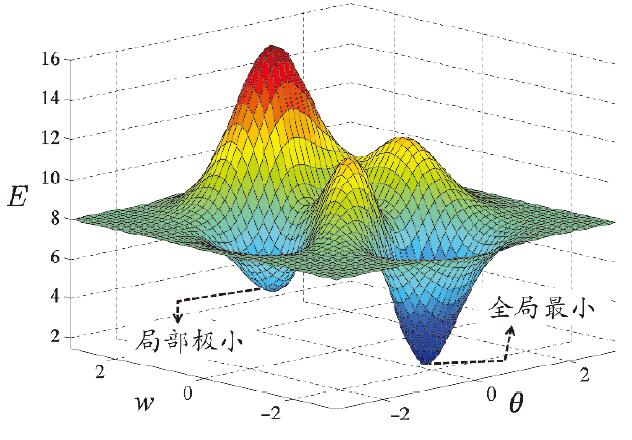
因为BP算法的感知机更新规则基于梯度下降,所以当误差函数有多个局部极小时,则不能找到全局极小解,此时我们称参数寻优陷入了局部极小。
“跳出”局部极小的常见策略:
不同的初始参数
模拟退火
随机扰动
遗传算法
……